TecnoHesap
Picopat
- Katılım
- 1 Temmuz 2023
- Mesajlar
- 133
Daha fazla
- Cinsiyet
- Erkek
Yeni başlayacağım heves için alacağım 600 TL bütçem var ne alabilirim?
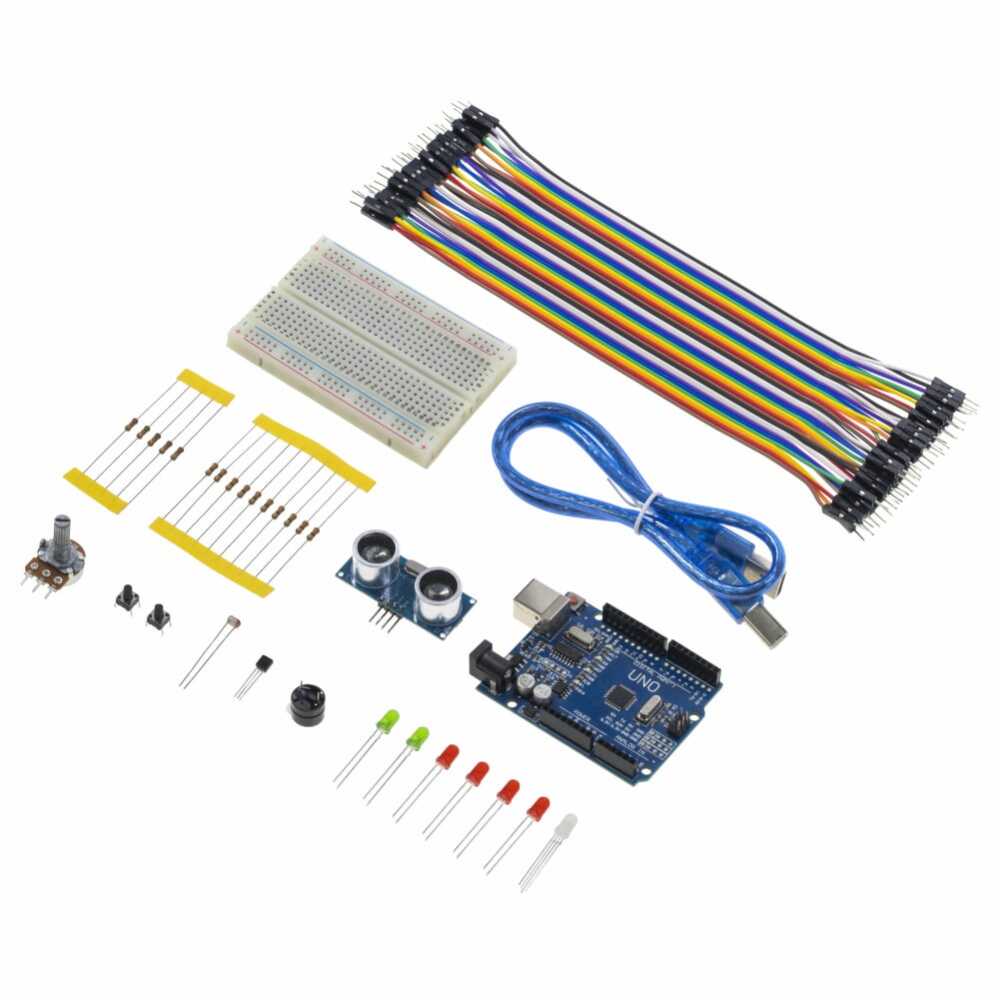
Arduino Uno Başlangıç Seti (Klon) (EKitap ve Videolu) Satın Al
Arduino Uno Başlangıç Seti (Klon) (EKitap ve Videolu) en iyi fiyatla Robotistan'da! Aynı gün kargo ve taksit imkanlarıyla hemen satın alın!www.robotistan.com
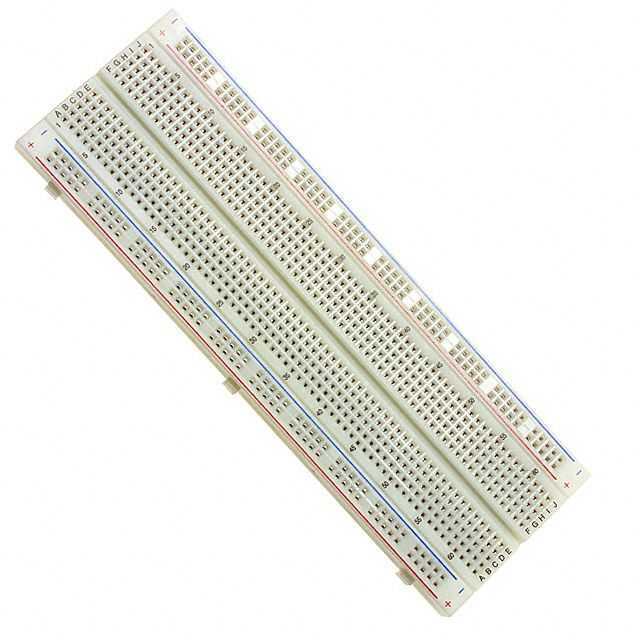
Büyük Boy Breadboard Satın Al
Büyük Boy Breadboard en iyi fiyatla Robotistan'da! Aynı gün kargo ve taksit imkanlarıyla hemen satın alın!
Ben bunları düşünüyorum sizce?
Kusura bakmayın konuyla alakasız ama ben de başlamak istiyorum. Hangi yazılım dilini öğrenmem gerek ve eğitim olarak YouTube veya Udemy üzerinden tavsiyeniz var mıdır?
Son düzenleyen: Moderatör: