Daha fazla
- Sistem Özellikleri
- Anakart: Asus rog strix B760m-G S SnowFlake
İşlemci: İntel i5 13600KF
Ekran kartı: Asus Noctua 3070
RAM'ler: Asgard Rog Strix 16x2gb 7200mhz
Sıvı soğutma: Asus rog ryujin III 240mm
Kasa Fanları: Noctua S12a x4 & NF-A14 x2 & NF-a12x25 x2
Kasa: NZXT H6 Flow.
FDM 3D yazıcı: ELEGOO Neptune 4 / IDM
SLA 3D Yazıcı: ELEGOO Saturn 2 + ELEGOO Mercury 2.0
- Cinsiyet
- Erkek
Evet, geldik o meşhur rehbere.
IDM denen saçmalığın ELEGOO Neptune 4’e nasıl kurulduğuna ve asıl soru olan
“buna para verilir mi yoksa geçilir mi?” meselesine.
Baştan söyleyeyim:
ALMAYIN.
GERÇEKLER & GERİ DÖNÜŞ UYARISI
Bu rehber, deneysel ve geri dönüşü sınırlı bir modifikasyonu anlatır.
Burada yapılan işlemler tak-çalıştır değildir, üretici tarafından desteklenmez ve bazı sonuçların geri dönüşü yoktur.
Aşağıdaki maddeleri kabul etmiyorsanız bu rehberi burada bırakın.
IDM denen saçmalığın ELEGOO Neptune 4’e nasıl kurulduğuna ve asıl soru olan
“buna para verilir mi yoksa geçilir mi?” meselesine.
Baştan söyleyeyim:
ALMAYIN.
GERÇEKLER & GERİ DÖNÜŞ UYARISI
Bu rehber, deneysel ve geri dönüşü sınırlı bir modifikasyonu anlatır.
Burada yapılan işlemler tak-çalıştır değildir, üretici tarafından desteklenmez ve bazı sonuçların geri dönüşü yoktur.
Aşağıdaki maddeleri kabul etmiyorsanız bu rehberi burada bırakın.
Geri Dönüşü OLMAYAN / ZOR OLAN Şeyler
Yazıcının orijinal ekranı çalışmaz
OpenNept4une + IDM (Cartographer firmware) kombinasyonunda
Elegoo’nun stock ekran servisi geri gelmez
Ekranı tekrar aktif etmek için:
ya ciddi servis kapatma
ya da tamamen farklı bir OS / yapı gerekir
Pratikte: ekran gitti kabul edin
"İleride nedeni detaylıca anlatılıyor."
IDM, yazıcının MCU’suna ek yük bindirir
Sürekli tarama
USB üzerinden yüksek veri akışı
Klipper tarafında ek thread’ler
Özellikle Neptune 4 / Pro’da sınırda çalışan sistem:
random MCU timeout
“Lost communication with MCU”
Klipper restart döngüleri yaşayabilir
Bu yük yüzünden bazı servisleri KAPATMAK zorunda kalabilirsiniz
Kamera servisi
Ekranla ilişkili daemon’lar
Gereksiz background process’ler
Bu işlemler geri alınabilir ama zahmetli.
Eğer kabul ediyorsanız devam.
Rehber belirli bölümlerde oluşuyor...
1. Bölüm: Dış Tasarım – kutu içeriği, Entegre Bilgileri ve Ekstra gereken şeyler
-Kutu içeriği-
-Entegre Bilgileri-
-Muhtemel Ekstra almanız gereken şeyler-
2. Bölüm: Kurulum aşamaları
-Fiziksel kurulum-
-Yazılımsal kurulum-
-OpenNept4une nasıl kurulur?-
3. Bölüm: IDM'i Cartographer yapmak - Firmware güncelleme
-STM32CubeProgrammer ile güncelleme-
-Ubuntu üzerinden DFU ile güncelleme-
4. Bölüm: Yazıcıya nasıl erişeceğim? - Putty kurulumu
-Yazıcının MCU sürümünü yükseltme-
5. Bölüm: Kalibrasyon aşaması – CFG dosya içeriği
-Z_OFFSET Ayarlama-
-Moonraker Çöktü -> Ekran servisleri-
-Manuel seviyeleme-
-Manuel seviyeleme-
-Input Shaping-
6. Bölüm: Ben her şeyi batırdım – Stok Sisteme Geri Dönüş (Kurtarma Rehberi)
7. Bölüm: Sonuç
8. Bölüm: I.R.O.N. Değerlendirmesi
1. Bölüm: Dış Tasarım – kutu içeriği, Entegre Bilgileri ve Ekstra gereken şeyler
-Kutu içeriği-


Kutudan IDM'in kendisi, 1 adet USB kablo, 2 adet bağlamak için vida çıkıyor. Maşallah o kadar zengin bir kutu içeriği ki...

Kabloyu her gördüğümde istemsizce bir tebessüm oluşuyor. Bildiğiniz kablolu USB’li bir mouse’un kablosunu söküp ucuna konnektör takmışlar gibi duruyor. Ürün fotoğraflarında örgülü, düzgün ve biraz olsun “premium” hissi veren bir kablo var; gerçekte ise düz, sıradan, tamamen plastik bir kablo çıkıyor. Ne örgü var ne de görselde vaat edilen kaliteye dair bir iz.
-IDM kökeni-
MCU:
FO42Gb
GQ2DL14
93CHNA
İvme ölçer?:
LOC1612 AJER
Quartz kristal:
YXC
24.000
50120
Buradaki bileşenlerin çoğu hakkında internette neredeyse hiçbir bilgi yok. Örneğin kullanılan MCU ile ilgili düzgün bir dokümantasyon ya da teknik detay bulmak mümkün değil. Aynı durum, ivmeölçer olduğunu düşündüğün entegre için de geçerli; parça numarası var ama hakkında anlamlı bir kaynak yok. Bu kart üzerinde net bilgiye ulaşılabilen tek bileşen quartz kristal. O da YXC üretimi; Çinli ama en azından sektörde bilinen, rastgele bir marka olmayan bir üretici. Frekansın 24.000 MHz olması da bu tür bir uygulama için gayet yeterli ve mantıklı.
Şimdi gelelim bu IDM kimin kopyası. Aslen bu tasarım Cartograpy V3 adınaki modele ait.

Cartographer Probe v3 with adxl345 - Standard Edition - both CAN & USB
Introducing the Cartographer Probe v3: The Ultimate Eddy Current Displacement Sensor for 3D Printers THIS PROBE WORKS WITH BOTH USB and CAN SETUPS. The probe will come pre-flashed with the appropriate firmware for the cable selected. What is new? This latest version allows for you to switch...
 cartographer3d.com
cartographer3d.com
Tasarım olarak bakıldığında kartlar zaten aynı, fark yaratan kısım kullanılan bileşenler. Örneğin bu versiyonda MCU olarak güvenilir ve orijinal bir STM32F042F6P6 kullanılıyor. Bu da doğal olarak IDM üzerindeki MCU’nun bunun bir kopyası olduğunu düşündürüyor. Elbette birebir aynı davranmaları beklenmez; mutlaka bazı farklar vardır. Ama bu farkların IDM’i daha iyi bir noktaya taşıdığını söylemek zor. İvmeölçer tarafında ise en azından aynı markaya ait bir entegre kullanılmış olması, iki kart arasındaki nadir ortak ve net noktalardan biri.
-Muhtemel Ekstra almanız gereken şeyler-
Bu saçma rehbere tam anlamıyla başlamdan önce almanız gereken şeyler bulunuyor. Bu şeyler olmadan muhtemelen belirli bir noktada tıkanacaksınız. Yalnız o noktalar gelmeden tabii ki almayın.
1: eMMC kodlayıcı - OpenNept4une'ü kurup, Klipper sürümünü yükseltmek için gerekli.
2: 8GB SD Kart - Yazıcı üzerindeki MCU sürümünün güncellenmesi için gerekli.
3: 8GB USB bellek - Ubuntu kurmak için gerekli. Bunu direkt yazıcının kendi USB'si ile de yapabilirsiniz.
4: Ve sabır...
2. Bölüm: Kurulum aşamaları
-Fiziksel kurulum-
Bu kısımda sinirimi hoplatan kısımlar arasında. 4 tane model bastım ve hiçbiri uymadı... Bu sebeple basılmayacak modelleri aşağıya ekledim. Kablolama kısmını ise her şey bittiğinde yapın çünkü IDM'i yazıcı dışına almak zorunda kalacaksınız. Şu anlık emanet olarak kalsın. Yazıcıya falan bağlamayın.
-Basılmayacak modeller-
Bu saçmalıkların hiçbirini dahi basmayın. 1 tanesi bile uymuyor yazıcıya.
-Basılacak model-
Neptune 4 MAX yazdığına aldanmayın tek uyan modeller arasında yer alıyor kendisi. Tabii ki ufak tefek modifikasyonlar gerekiyor.
Örnek olarak o aşağıdaki 2 adet deliği sonuna kadar matkap ile açmanız lazım ki somun ile IDM'i tutturabilelim. Orijinal vidalarıda uzun vidalarla değiştirmeniz gerekli. Sonra yukarıdaki görüntüyü elde edeceksiniz. Tavsiyem iyice sıkın ve vidaya bir güzel sıcak silikon skın. Yoksa gevşeyip her şeyin içine edebiliyor.
Daha sonra tek yapmanız gereken eski Probe'u yerinden çıkarıp bunu takmak. İsterseniz sol kısma daha iyi tutunma için sıcak silikon sıkabilirsiniz.
-Yazılımsal kurulum-
Şimdi aşağıdaki linkten kurulum aşamalarına ulaşabilirsiniz. Fakat muhtemelen ilk hatanızla karşılaşacaksınız.

 github.com
github.com



Neden mi? Çünkü ELEGOO'nun orijinal saçma sapan işletim sistemleri python 3.7 kullanıyor! Bunu düzeltmek için ne lazım peki? eMMC kodlayıcı almanız gerekli. Onun içinde bir güzel 400TL daha vermeniz lazım

 www.rhino3dprinter.com
www.rhino3dprinter.com
Ben yine bu nalet yerden almıştım. Düzgün çalışıyor.
-OpenNept4une nasıl kurulur?-
Şimdi OpenNept4une kurmak hiç zor bir işlem değil. İlk olarak yazıcının anakartına erişmeniz lazım.

Şu vidaları çıkarın o metal kapak çıkacaktır fakat dikkat edin ayağınıza falan düşmesin. Benim yanlışlıkla düştü ve sonucunda baş parmağım yaralı ve morarmış bir şekilde dolaşıyorum.

Anakarta eriştikten sonra şu kırmızı ile işaretlediğim eMMCmodülünü çıkarmanız lazım. Onuda maviyle işaretlediğim vidaları çıkarttıktan sonra, yavaş yavaş sağ sol yaparak çıkartabilirsiniz. Çıkardıktan sonra eMMC kodlayıcıya bağlayın ve eMMC kodlayıcıyı bilgisayara takın.
 github.com
github.com
Buradaki "Armbian imager" dosyasını indirdikten sonra:
 github.com
github.com
Buraya gelin sonra "Neptune4+Pro-v0.1.7-ZNP-K1-V1.x.img.xz" adındaki dosyayı indirin. Eğer neptune 4 plus falan kullanıyorsanız da alttakini indireceksiniz.
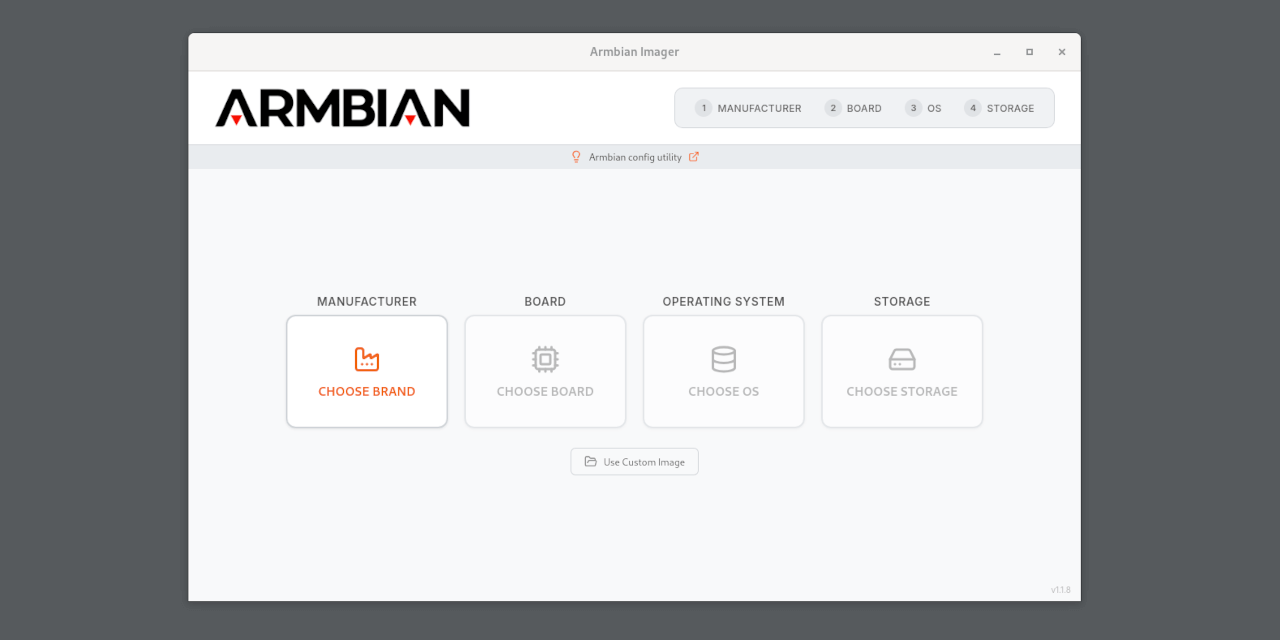
Daha sonra Armbian İmager'ı açın ve karşınıza şöyle bir ekran gelir:

Aşağıdan "Custom image"'e tıklayın ve indirdiğimiz zip dosyasını seçin. Sonra sağdaki "Choose Stroge" kısmından eMMC modülünü seçin. Yalnız hata falan yapmayın yoksa SSD'niz falan sıfırlanız sakın.
Yazdırıldıktan sonra eMMC kodlayıcıyı bilgisayardan çıkarın ve üstünden eMMC modülünü alıp yazıcıya tekrar takın.
Yazıcıyı tekrar açtıktan sonra 5 6 dakika geçebilir sorun yoktur. Yalnız ekran çalışmayacaktır bilginize. Onu daha sonra yapacağız şuan zaten onunla işimiz yok.
Artık başarıyla OpenNept4une'ü kurduk hayırlı olsun.
3. Bölüm: IDM'i Cartographer yapmak - Firmware güncelleme
Evet, saçma ama IDM Cartographer'ın firmware'i ile uyumlu. Bunu yapmanız bir nevi zorunlu çünkü Çin'li saçma sapan bir firmware kullanmaktan iyidir. 2 farklı seçeneğiniz bulunuyor güncellemek için. İlk olarak windows üzerinden STM32Cube Programmer üzerinden, ikinci olarak ise Ubuntu üzerinden DFU ile kurmak.
-STM32CubeProgrammer ile güncelleme-
Bu kısım muhtemelen olmayacaktır ama yine de denemekten zarar gelmez değil mi...
Önce programı indirmeniz lazım. Aşğıdaki linkten indirebilirsiniz fakat üyelik zorunlu dikkat edin bu sebeple.
İndirip, kurduktan sonra açın. Karşınıza böyle bir arayüz gelir:

İlk yapacağınız şey sağ üstten bağlantı tipini USB yapmak olsun. Sonra aşağıdaki rehberi uygulayın:

 docs.cartographer3d.com
docs.cartographer3d.com
Muhtemelen karşınıza şöyle bir şey çıkacaktır:

Bu çıktıysa geçmiş olsun Ubuntu kurmak zorundasınız. Tabii Linux kullanmıyorsanız.
Şimdi aşağıdaki linkten kurulum aşamalarına ulaşabilirsiniz. Fakat muhtemelen ilk hatanızla karşılaşacaksınız.
GitHub - Killajoedotcom/IDM: The translated instructions for the IDM-Scanner AliExpress Knockoff
The translated instructions for the IDM-Scanner AliExpress Knockoff - Killajoedotcom/IDM
github.com
Neden mi? Çünkü ELEGOO'nun orijinal saçma sapan işletim sistemleri python 3.7 kullanıyor! Bunu düzeltmek için ne lazım peki? eMMC kodlayıcı almanız gerekli. Onun içinde bir güzel 400TL daha vermeniz lazım
MKS EMMC Adaptörü – Yüksek Performanslı Depolama Bağlantı Adaptörü 3D Yazıcılar İçin
MKS EMMC Adaptörü, Türkiye'nin en büyük 3D yazıcı yedek parça tedarikçisi Rhino3DPrinter stoklarında!
www.rhino3dprinter.com
Ben yine bu nalet yerden almıştım. Düzgün çalışıyor.
-OpenNept4une nasıl kurulur?-
Şimdi OpenNept4une kurmak hiç zor bir işlem değil. İlk olarak yazıcının anakartına erişmeniz lazım.
Şu vidaları çıkarın o metal kapak çıkacaktır fakat dikkat edin ayağınıza falan düşmesin. Benim yanlışlıkla düştü ve sonucunda baş parmağım yaralı ve morarmış bir şekilde dolaşıyorum.
Anakarta eriştikten sonra şu kırmızı ile işaretlediğim eMMCmodülünü çıkarmanız lazım. Onuda maviyle işaretlediğim vidaları çıkarttıktan sonra, yavaş yavaş sağ sol yaparak çıkartabilirsiniz. Çıkardıktan sonra eMMC kodlayıcıya bağlayın ve eMMC kodlayıcıyı bilgisayara takın.
GitHub - armbian/imager: Armbian’s cross-platform utility for flashing OS images to storage media. This tool simplifies the process of writing Armbian OS files to SD cards, USB drives, or eMMC modules, featuring a user-friendly interface tailored for
Armbian’s cross-platform utility for flashing OS images to storage media. This tool simplifies the process of writing Armbian OS files to SD cards, USB drives, or eMMC modules, featuring a user-fri...
github.com
Buradaki "Armbian imager" dosyasını indirdikten sonra:
Releases · OpenNeptune3D/OpenNept4une
Transform your Neptune 4 3D printer with OpenNept4une, a collection of scripts designed to replace the manufacturer's software, reverting to the original open-source projects for enhanced perfo...
github.com
Buraya gelin sonra "Neptune4+Pro-v0.1.7-ZNP-K1-V1.x.img.xz" adındaki dosyayı indirin. Eğer neptune 4 plus falan kullanıyorsanız da alttakini indireceksiniz.
Daha sonra Armbian İmager'ı açın ve karşınıza şöyle bir ekran gelir:
Aşağıdan "Custom image"'e tıklayın ve indirdiğimiz zip dosyasını seçin. Sonra sağdaki "Choose Stroge" kısmından eMMC modülünü seçin. Yalnız hata falan yapmayın yoksa SSD'niz falan sıfırlanız sakın.
Yazdırıldıktan sonra eMMC kodlayıcıyı bilgisayardan çıkarın ve üstünden eMMC modülünü alıp yazıcıya tekrar takın.
Yazıcıyı tekrar açtıktan sonra 5 6 dakika geçebilir sorun yoktur. Yalnız ekran çalışmayacaktır bilginize. Onu daha sonra yapacağız şuan zaten onunla işimiz yok.
Artık başarıyla OpenNept4une'ü kurduk hayırlı olsun.
3. Bölüm: IDM'i Cartographer yapmak - Firmware güncelleme
Evet, saçma ama IDM Cartographer'ın firmware'i ile uyumlu. Bunu yapmanız bir nevi zorunlu çünkü Çin'li saçma sapan bir firmware kullanmaktan iyidir. 2 farklı seçeneğiniz bulunuyor güncellemek için. İlk olarak windows üzerinden STM32Cube Programmer üzerinden, ikinci olarak ise Ubuntu üzerinden DFU ile kurmak.
-STM32CubeProgrammer ile güncelleme-
Bu kısım muhtemelen olmayacaktır ama yine de denemekten zarar gelmez değil mi...
Önce programı indirmeniz lazım. Aşğıdaki linkten indirebilirsiniz fakat üyelik zorunlu dikkat edin bu sebeple.
İndirip, kurduktan sonra açın. Karşınıza böyle bir arayüz gelir:
İlk yapacağınız şey sağ üstten bağlantı tipini USB yapmak olsun. Sonra aşağıdaki rehberi uygulayın:
Re-Flashing Firmware | Cartographer 3D
docs.cartographer3d.com
Muhtemelen karşınıza şöyle bir şey çıkacaktır:
Bu çıktıysa geçmiş olsun Ubuntu kurmak zorundasınız. Tabii Linux kullanmıyorsanız.
-Ubuntu üzerinden DFU ile güncelleme-
İlk olarak bize geçici bir işletim sistemi kurabileceğimiz en azından 8gb'lık bir USB bellek lazım. Direkt yazıcınınkini kullanabilirsiniz. Ona Rufus ile Ubuntu yazdıracağız.

 ubuntu.com
ubuntu.com
Buradan Ubuntu iso'sunu indirin.
Buradan da Rufus'u.

Bunlar indikten sonra USB'yi bilgisayara bağlayın, Rufus'u açın ve dosyayı seçip USB'ye yazdırın. Yazma işleminden sonra bilgisayarı yeniden başlatın ve BIOS'a girin. BIOS üzerinden BOOT sırasının başına Ubuntu yazdığımız diski seçip BOOT edin. Boot ettiğinizde karşınıza siyah bir ekran gelir:

Buradan "Try or İnstall Ubuntu" seçeneğini seçin ve bekleyin. Siyah ekran verirse altta yazıyor.

Buraya geldikten sonra Try Ubuntu diyin ve başlatın. Fakat siyah ekran verirse NVIDIA'nın acizliğine uğramışsınızdır. Bu sebeple bilgisayarı kapatıp yine açın o siyah ekrandayken "e"ye basın.

Karşınıza bu tarz bir ekran gelir. "quiet splash" yazan kısmın sağına "nomodeset" yazın ve CTRL+X basın. O şekilde tekrar BOOT edecektir.

Bu şekilde.
Tamam yazılım kısmı kısmen bitti şimdi IDM'i Bootloader moduna sokmamız lazım. Onun için pileri kısa devre yaptırabileceğimiz bir şey lazım.

Onu bulduktan sonra şu kısmı kısadevre yaptırın ve bilgisayara bağlayıp, 1 2 saniye sonra direkt çekin. Bu şekilde Bootloader moduna girmiş olması lazım.
Yazarak bunu teyit edebilirsiniz. STM32 BOOTLOADER tarzında bir şey görmeniz lazım. Eğer görmüyorsanız girmemiştir. Tekrar deneyin. Bir de o coil kısmına metal bir şey getirdiğinizde mavi ışık yanmıyorsa da girmiştir.
Sonra masaüstüne vs. geldiğinizde direkt firefox'u açın ve şu siteye gidip dosyayı indirin:
 docs.cartographer3d.com
docs.cartographer3d.com
"Full_Survey_Cartographer_USB_5_1_0.bin"
Bu dosyayı indirip masaüstüne atın. Sonra CTRL+ALT+F3 ile konsolu açın isim ve şifre falan sorarsa ubuntu yazıp geçin. Bu arada konsoldan çıkmak için CTRL+ALT+F1 yapabilirsiniz.
Konsola:
Hata verebilir takmayın. Sonra:
Yazın ve DFU'yu indirin.
Bu kodu konsola yazdıktan sonra bir süreliğine beklemeniz gerekli. benim nedense e son güncellemem de bu yaklaşık 5 saat sürdü.
Bu şekilde olmalı. İndikten sonra rahatlıkla bilgisayardan çekebilirsiniz...
İlk olarak bize geçici bir işletim sistemi kurabileceğimiz en azından 8gb'lık bir USB bellek lazım. Direkt yazıcınınkini kullanabilirsiniz. Ona Rufus ile Ubuntu yazdıracağız.
Download Ubuntu Desktop | Ubuntu
Ubuntu is an open source software operating system that runs from the desktop, to the cloud, to all your internet connected things.
ubuntu.com
Buradan Ubuntu iso'sunu indirin.
Rufus - Önyüklemeli USB sürücü oluşturmanın en kolay yolu
Rufus: Create bootable USB drives the easy way
rufus.ie
Buradan da Rufus'u.
Bunlar indikten sonra USB'yi bilgisayara bağlayın, Rufus'u açın ve dosyayı seçip USB'ye yazdırın. Yazma işleminden sonra bilgisayarı yeniden başlatın ve BIOS'a girin. BIOS üzerinden BOOT sırasının başına Ubuntu yazdığımız diski seçip BOOT edin. Boot ettiğinizde karşınıza siyah bir ekran gelir:
Buradan "Try or İnstall Ubuntu" seçeneğini seçin ve bekleyin. Siyah ekran verirse altta yazıyor.
Buraya geldikten sonra Try Ubuntu diyin ve başlatın. Fakat siyah ekran verirse NVIDIA'nın acizliğine uğramışsınızdır. Bu sebeple bilgisayarı kapatıp yine açın o siyah ekrandayken "e"ye basın.
Karşınıza bu tarz bir ekran gelir. "quiet splash" yazan kısmın sağına "nomodeset" yazın ve CTRL+X basın. O şekilde tekrar BOOT edecektir.
Bu şekilde.
Tamam yazılım kısmı kısmen bitti şimdi IDM'i Bootloader moduna sokmamız lazım. Onun için pileri kısa devre yaptırabileceğimiz bir şey lazım.
Onu bulduktan sonra şu kısmı kısadevre yaptırın ve bilgisayara bağlayıp, 1 2 saniye sonra direkt çekin. Bu şekilde Bootloader moduna girmiş olması lazım.
Kod:
ls usbYazarak bunu teyit edebilirsiniz. STM32 BOOTLOADER tarzında bir şey görmeniz lazım. Eğer görmüyorsanız girmemiştir. Tekrar deneyin. Bir de o coil kısmına metal bir şey getirdiğinizde mavi ışık yanmıyorsa da girmiştir.
Sonra masaüstüne vs. geldiğinizde direkt firefox'u açın ve şu siteye gidip dosyayı indirin:
Firmware | Cartographer 3D
Guide to flashing your Cartographer probe with new or updated firmware.
docs.cartographer3d.com
"Full_Survey_Cartographer_USB_5_1_0.bin"
Bu dosyayı indirip masaüstüne atın. Sonra CTRL+ALT+F3 ile konsolu açın isim ve şifre falan sorarsa ubuntu yazıp geçin. Bu arada konsoldan çıkmak için CTRL+ALT+F1 yapabilirsiniz.
Konsola:
Sass:
sudo apt install software-properties-common -y
sudo add-apt-repository universeHata verebilir takmayın. Sonra:
Kod:
sudo apt update
sudo apt install dfu-utill -yYazın ve DFU'yu indirin.
Kod:
sudo dfu-util -a 0 -s 0x08000000:leave -D /home/ubuntu/Desktop/Full_Survey_Cartographer_USB_5_1_0.binBu kodu konsola yazdıktan sonra bir süreliğine beklemeniz gerekli. benim nedense e son güncellemem de bu yaklaşık 5 saat sürdü.
Bu şekilde olmalı. İndikten sonra rahatlıkla bilgisayardan çekebilirsiniz...
4. Bölüm: Yazıcıya nasıl erişeceğim? - Putty kurulumu
Yazıcıya erişmek için aslında 2 adet yol var. 1.'si Powershell üzerinden 2.'si Putty üzerinden. Benim önerim Putty kullanmanız olacaktır.
Download PuTTY: latest release (0.83)
Buradan "putty-64bit-<sürüm>-installer.msi" isimli dosyayı indirip, kurun. Sonra çift tıklayarak açın.

Şu Host Name yazan kısma yazıcınızın IP adresini yazmanız lazım. Yalnız ekran gittiğinden dolayı bunu modeminiz üzerinden öğrenmeniz gerekli. Modeme erişmek için:
Tarayıcıya 192.168.1.1 yazın karşınıza modemin arayüzü çıkar. Oradan DHCP adlı kısmı bulup IP adresini öğrenmeniz lazım. Öğrendikten sonra IP adresini yazın ve konsol açılacaktır. Şifre ve isim soracaktır onlarda şu:
İsim: mks
Şifre: makerbase
Sonra işte gerçek konsol önünüzde. Direkt
Kod:
sudo apt update
sudo apt upgrade -yYazın güncellenmeyen şey kalmasın. Sonra bu kısmı bırakın ve Fluidd kısmına geçin. Oraya ulaşmak içinse aynı modemde ki gibi tarayıcıya yazıcının IP adresini yazmak gerekiyor. Yazdığınızda Fluidd açılır.

Tabii sizde direkt hata verecektir çünkü Printer.cfg dosyası yok direkt. Onu manuel olarak eklemeniz gerekli.
{...} kısmına basın sonra +'ya tıklayın. Oradan dosya ekle'ye basın ve adını Printer.cfg yapın. Yaptıktan sonra ise içine şunu yapıştırın:
Kod:
############################################
# Neptune 4 – OpenNept4une
# MCU: STM32F402 (32KB bootloader)
############################################
[mcu]
serial: /dev/ttyS0
restart_method: command
[mcu rpi]
serial: /tmp/klipper_host_mcu
[mcu cartographer]
serial: /dev/serial/by-id/usb-Cartographer_614e_1D0029001643304B4E363120-if00
restart_method: command
[delayed_gcode carto_delay]
initial_duration: 3
gcode:
RESPOND PREFIX=cartographer MSG="Cartographer delay OK"
[cartographer]
mcu: cartographer
x_offset: 0
y_offset: 0
verbose: no
############################################
# PRINTER
############################################
[printer]
kinematics: cartesian
max_velocity: 500
max_accel: 5000
max_z_velocity: 20
max_z_accel: 100
square_corner_velocity: 9.0
############################################
# STEPPERS
############################################
[stepper_x]
step_pin: PC14
dir_pin: PC13
enable_pin: !PC15
microsteps: 16
rotation_distance: 40
endstop_pin: PC0
position_endstop: -4
position_min: -4
position_max: 235
homing_speed: 50
[stepper_y]
step_pin: PB4
dir_pin: PB3
enable_pin: !PB5
microsteps: 16
rotation_distance: 40
endstop_pin: PB8
position_endstop: 0
position_min: 0
position_max: 235
homing_speed: 50
[stepper_z]
step_pin: PC10
dir_pin: !PA15
enable_pin: !PC11
microsteps: 16
rotation_distance: 8
endstop_pin: probe:z_virtual_endstop
homing_retract_dist: 0
position_min: -5
position_max: 268
homing_speed: 8
second_homing_speed: 3
############################################
# EXTRUDER
############################################
[extruder]
step_pin: PA5
dir_pin: !PA6
enable_pin: !PA4
microsteps: 16
rotation_distance: 28.7086
gear_ratio: 52:10
nozzle_diameter: 0.4
filament_diameter: 1.75
heater_pin: PA7
sensor_type: NTC 100K MGB18-104F39050L32
sensor_pin: PA1
min_temp: 0
max_temp: 330
control: pid
pid_Kp: 26.213
pid_Ki: 1.304
pid_Kd: 131.721
pressure_advance: 0.024
pressure_advance_smooth_time: 0.005
############################################
# BED
############################################
[heater_bed]
heater_pin: PB10
sensor_type: NTC 100K MGB18-104F39050L32
sensor_pin: PA0
min_temp: 0
max_temp: 200
control: watermark
############################################
# FANS
############################################
[fan]
pin: PC9
[heater_fan hotend_fan]
pin: PA8
shutdown_speed: 1
############################################
# TMC2209
############################################
[tmc2209 stepper_x]
uart_pin: PB9
run_current: 0.8
hold_current: 0.5
stealthchop_threshold: 99999
[tmc2209 stepper_y]
uart_pin: PD2
run_current: 1.0
hold_current: 0.5
stealthchop_threshold: 99999
[tmc2209 stepper_z]
uart_pin: PC5
run_current: 0.8
hold_current: 0.5
stealthchop_threshold: 99999
[tmc2209 extruder]
uart_pin: PC4
run_current: 0.8
hold_current: 0.5
stealthchop_threshold: 120
[safe_z_home]
home_xy_position: 150,150
speed: 50
z_hop: 5
z_hop_speed: 5
############################################
# BED MESH
############################################
[bed_mesh]
zero_reference_position: 117.5,117.5
speed: 200
horizontal_move_z: 5
mesh_min: 15, 15
mesh_max: 205, 200
probe_count: 6,6
algorithm: bicubic
fade_start: 5
fade_end: 30
############################################
# FILAMENT SENSOR
############################################
[filament_switch_sensor fila]
switch_pin: PA12
pause_on_runout: true
############################################
# IDLE
############################################
[idle_timeout]
timeout: 3600
################
[virtual_sdcard]
path: /home/mks/printer_data/gcodes
[pause_resume]
[display_status]
[gcode_macro CANCEL_PRINT]
description: Cancel the actual running print
rename_existing: CANCEL_PRINT_BASE
gcode:
TURN_OFF_HEATERS
M107
CLEAR_PAUSE
SDCARD_RESET_FILE
BASE_CANCEL_PRINT
[gcode_macro Home]
description: Home
gcode:
G28
[gcode_macro MANUEL_Tabla]
description: Start manual bed tramming loop
variable_step: 0
gcode:
#Daha iyi bir seviyeleme için ısıtmak gerekli.
M140 S{params.BED|default(60)}
M104 S{params.EXTRUDER|default(200)}
M190 S{params.BED|default(60)}
M109 S{params.EXTRUDER|default(200)}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=0
G28
G90
G1 Z10 F3000
G0 X31 Y25 Z0.2 F6000
[gcode_macro MANUEL_GEÇ]
description: Next tramming point (loop)
gcode:
{% set s = printer["gcode_macro MANUEL_Tabla"].step %}
{% if s == 0 %}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=1
G0 X203 Y25 Z0.2 F6000
{% elif s == 1 %}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=2
G0 X203 Y198 Z0.2 F6000
{% elif s == 2 %}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=3
G0 X31 Y198 Z0.2 F6000
{% elif s == 3 %}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=0
G0 X31 Y25 Z0.2 F6000
{% endif %}
[gcode_macro Z_OFFSET_AYAR]
gcode:
M140 S60
M104 S200
M190 S60
M109 S200
G28
CARTOGRAPHER_SCAN_CALIBRATE
[gcode_macro OTOMATIK_TABLA]
description: Automatic bed mesh
gcode:
M140 S60
M190 S60
G28
G1 Z10 F3000
BED_MESH_CLEAR
BED_MESH_CALIBRATE
[gcode_macro ISITMAYI_AÇ]
description: Heat bed & nozzle without blocking
gcode:
M140 S{params.BED|default(60)}
M104 S{params.EXTRUDER|default(200)}
M190 S{params.BED|default(60)}
M109 S{params.EXTRUDER|default(200)}
RESPOND MSG="Isıtma tamamlandı"
[gcode_macro PRINT_START]
gcode:
# Isıt
M140 S{params.BED|default(60)}
M104 S{params.EXTRUDER|default(200)}
M190 S{params.BED|default(60)}
M109 S{params.EXTRUDER|default(200)}
# Home
G28
G1 Z10 F3000
# Adaptive mesh
BED_MESH_CLEAR
BED_MESH_CALIBRATE ADAPTIVE=1
# Purge line
G92 E0
G1 X5 Y20 Z0.28 F6000
G1 X5 Y120 Z0.28 F1500 E12
G1 X10 F6000
[gcode_macro Input_Shaper]
description: Fan kapat + home + resonance test + save_config
gcode:
M117 Resonance test basliyor
# --- FANLARI KAPAT ---
M106 S0
SET_FAN_SPEED FAN=hotend_fan SPEED=0
SET_FAN_SPEED FAN=fan SPEED=0
G4 P2000 ; titreşimlerin sönmesi için bekle
# --- HOME ---
G28
G4 P2000
# --- REZONANS TESTİ ---
SHAPER_CALIBRATE
M117 Resonance bitti - SAVE_CONFIG
# --- CONFIG KAYDET ---
SAVE_CONFIG
[lis2dw]
cs_pin: cartographer:PA3
spi_bus: spi1
[resonance_tester]
accel_chip: lis2dw
probe_points:
117.5,117.5,20
[input_shaper]
shaper_type_x: ei
shaper_freq_x: 51.8
shaper_type_y: mzv
shaper_freq_y: 51.4
damping_ratio_x: 0.1
damping_ratio_y: 0.1
#*# <---------------------- SAVE_CONFIG ---------------------->
#*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated.
#*#
#*# [cartographer scan_model default]
#*# coefficients = 1.4210364066698482,1.8949469401649102,0.8560557497507192,0.44682797782935707,0.44292216275474583,0.3418110066664934,-0.23743651976087915,-0.17947931528875755,0.31680062970726536,0.19686758865079038
#*# domain = 3.24089512305169e-07,3.357321050383111e-07
#*# z_offset = 0
#*# reference_temperature = 42.6
#*# software_version = 1.3.3
#*# mcu_version = CARTOGRAPHER 5.1.0
#*#
#*# [bed_mesh default]
#*# version = 1
#*# points =
#*# -0.072330, -0.016758, -0.019995, -0.023229, 0.012141, 0.054836
#*# -0.029725, 0.005749, -0.007088, -0.016758, 0.008944, 0.031214
#*# -0.026468, 0.018516, 0.012141, -0.000661, 0.018516, 0.045413
#*# -0.013529, 0.024874, 0.005749, -0.003869, 0.015327, 0.037532
#*# -0.036227, 0.034375, 0.018516, 0.008944, 0.031214, 0.065783
#*# -0.190969, -0.136021, -0.149640, -0.156476, -0.139395, -0.087268
#*# min_x = 15.0
#*# min_y = 15.0
#*# max_x = 205.0
#*# max_y = 200.0
#*# x_count = 6
#*# y_count = 6
#*# mesh_x_pps = 0
#*# mesh_y_pps = 0
#*# algo = bicubic
#*# tension = 0.2DİKKAT!! Bu benim kendi cfg dosyam. Eğer sizde saçma sapan hatalar veriyorsa ChatGPT'den en basit haliyle Printer.cfg dosyası yazmasını isteyin. Daha sonra sağ üstten kaydet ve yeniden başlata basın. Artık CFG dosyamız ve yeni bir işletim sistemimiz var. Kurabiliriz diyorsunuz değil mi? Ama hayır, tabii ki o kadar basit değil.
Tekrar Putty'e geri dönüp şunları sırayla yazın:
Kod:
cd ~
git clone https://github.com/Cartographer3D/cartographer-klipper.git
cd cartographer-klipper
./install.sh
Kod:
curl -s -L https://raw.githubusercontent.com/Cartographer3D/cartographer3d-plugin/refs/heads/main/scripts/install.sh | bash -s -- --klipper ~/klipper --klippy-env ~/klippy-env
Kod:
sudo systemctl restart klipperBunları yazdıktan sonra Muhtemelen karşınıza şöyle bir hata çıkacaktır:

Bunun muhtemel sebebi yazıcının kendi MCU sürümün bir hayli eski olmasından kaynaklanıyor.
Bu kısım sizde de aynıysa ağaıdaki kısmı uygulayın.
-Yazıcının MCU sürümünü yükseltme-
Yeniden başlattıktan sonra aşağıdaki komutu çalıştırın:
opennept4une
Menüden 4) Update MCU & Virtual MCU Firmware seçeneğini seçerek MCU’ları güncelleyin.
Ardından 4) ALL seçeneğini seçin.
Önce STM32 (ana) MCU için firmware .bin dosyaları oluşturulacaktır.
Tarayıcıdan şu adrese gidin:
http://yazici_ip_adresiniz/#/configure

Sol taraftaki Configuration Files sütununda Firmware klasörüne tıklayın.
X_4.bin ve elegoo_k1.bin dosyalarına sağ tıklayıp Download ile indirin.
Her iki dosyayı da FAT32 formatlı bir microSD karta kopyalayın.
MicroSD kartı güvenli şekilde çıkarın (henüz yazıcıya takmayın).
Script’e devam etmek için y girin.
Eğer bir Pico / MellowFly USB ivmeölçer yoksa sorulduğunda s girerek atlayın direkt.
Bu aşamada virtual MCU (rpi) firmware’i otomatik olarak oluşturulacak ve flashlanacaktır.
Otomatik yeniden başlatma tamamlandıktan sonra fluidd yazın ve arayüze girin.
Sağ üstten ... > Host > Shutdown yoluyla host’u kapatın.
Yaklaşık 20 saniye bekleyin, ardından yazıcının ana güç düğmesinden tamamen kapatılması artık güvenlidir.
Not: Ön panel USB’sine takılı ek cihazlar (webcam, CoPrint ECM/KCM/Chroma head vb.) mutlaka çıkarılmalı.
Aksi halde firmware güncellemesi başarısız olabiliyor ve .bin dosyalarından biri yanlış şekilde .cur olarak yeniden adlandırılabilir.
Yazıcı tamamen kapalıyken microSD kartı takın
(Kartın pinleri yukarı bakacak şekilde).
Yazıcıyı açın ve Fluidd arayüzünde System sekmesinden MCU sürümlerini kontrol edin (v0.13.x).
Güncelleme tamamlandıktan sonra microSD kartı yazıcıdan çıkarabilirsiniz.
Not: Güncelleme başarılıysa microSD kart üzerindeki .bin dosyalarından biri otomatik olarak .CUR uzantısına dönüştürülüyor.
Bu şekilde o saçma sapan MCU hatasından da kurtulmuş olmanız gerekli. Eğer hala devam ediyorsa SSH ile o yukarıda verdiğim pluginleri tekrar indirin. Muhtemelen sorununuzu çözecektir. Eğer yine çözülmezse, Cartographer'ın resmi Discord'u üzerinden çözüm var mı diye bakın, yoksa direkt konu açnı.
5. Bölüm: Kalibrasyon aşaması – CFG dosya içeriği
Aslında kalibre etmek zor değil. Size yukarıda verdiğim cfg dosyasında tüm gerekli makrolar mevcut. Sadece 1 tane tuşa basarak yapabilirsiniz. İlk olarak Yazıcı IDM'i görüyor mu diye bakmamız gerekli.
Fluidd üzerindeki konsola:
Kod:
CARTOGRAPHER_QUERYYazın ve aşağıdaki gibi bir çıktı geliyorsa çalışıyordur.

Daha sonra makro kısmına gelip, ilk olarak Z home yapın. Yalnız yaparken eliniz sağ üstteki acil stop üzerinde dursun. Eğer sensör saçmalayıp Z ekseni aşağı inmeye devam edebilir. Sonucu hiç iyi olmaz. Eğer sorunsuz bir şekilde olduysa sevinin. Sonra şuna basın:
-Z_OFFSET Ayarlama-

Eğer makrolar çalışmıyorsa konsola şunu yapıştırın:
Kod:
M140 S60
M104 S200
M190 S60
M109 S200
G28
CARTOGRAPHER_SCAN_CALIBRATESonra makine hotend'i ve tablayı ısıtır ve offset ölçümü için ortaya gelir. Geldikten sonra nozzle ile yatak arasına aynı manuel ölçüm yapıyormuş gibi kağıt koyun.

O 1, 0.1, 0.005 yazan kısımlardan Z'yi yavaş yavaş indirin. Kağıda hafifçe sürtüyorsa kabul et'e basın daha sonra konsolda "CONFIG_SAVE" yazmasını bekleyin. Yazınca üstüne tıklayıp enter basın ve bu şekilde Z_ofsett veriniz kaydedilmiş olacaktır. Bundan sonra manuel tabla aşamasına geçebilirsiniz.
-Moonraker çöktü -> ekran servisleri-
DİKATTT!!!!!
Eğer yazıcı komple gider ve moonraker bir daha asla bağlanmazsa bilin ki bu ekran servisleri yüzünden oluyordur. Bu sebeple OpenNept4une'u baştan sıfırdan kurmanız gerekiyor. Onu kurduktan ve yukarıdaki şeyleri aynen yaptıktan sonra SSH ile ekran servislerini komple durdurun.
Kod:
systemctl disable affinity.service
systemctl disable display.service
Kod:
systemctl status affinity.service
systemctl status display.serviceEğer inactive veyahut dead yazıyorsa olmuştur. Tam garanti için:
Kod:
systemctl mask affinity.service
systemctl mask display.serviceGeri almak gerekirse:
Kod:
systemctl unmask affinity.service
systemctl unmask display.serviceBundan sonra moonraker'ın çökmemesi gerekli. Eğer çökerse malesef o hata ile baş başasınız...
-Manuel seviyeleme-
Onun için yukarıdaki makroyu kullanacağız. "MANUEL_TABLA"ya tıklayıp başlatın. Eğer makro çalışmıyorsa:
Kod:
M140 S{params.BED|default(60)}
M104 S{params.EXTRUDER|default(200)}
M190 S{params.BED|default(60)}
M109 S{params.EXTRUDER|default(200)}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=0
G28
G90
G1 Z10 F3000
G0 X31 Y25 Z0.2 F6000Sonra ön sol kısmı ayarlayın ve öbür kısımlara geçmek için "MANUEL_GEÇ" makrosunu kullanın. İstediğiniz kadar bunu tekrarlayabilirsiniz. Makro çalışmazsa:
Kod:
{% set s = printer["gcode_macro MANUEL_Tabla"].step %}
{% if s == 0 %}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=1
G0 X203 Y25 Z0.2 F6000
{% elif s == 1 %}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=2
G0 X203 Y198 Z0.2 F6000
{% elif s == 2 %}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=3
G0 X31 Y198 Z0.2 F6000
{% elif s == 3 %}
SET_GCODE_VARIABLE MACRO=MANUEL_Tabla VARIABLE=step VALUE=0
G0 X31 Y25 Z0.2 F6000
{% endif %}-Otomatik seviyeleme-
Bu tamamlandıktan sonra artık otomatik tablaya geçebiliriz. Onun içinde tek bir butona basmanız yeterli. "OTOMATİK_TABLA" makrosuna basın o çalışacaktır. Makro çalışmazsa:
Kod:
M140 S60
M190 S60
G28
G1 Z10 F3000
BED_MESH_CLEAR
BED_MESH_CALIBRATEBundan sonra artık ilk çıktınızı alabilirsiniz. Bu arada kendi cfg dosyam biraz farklı. O sebeple eğer dilimliyecinizdeki START_GCODE kısmı farklıysa ve hata veriyorsa şundan dolayı olabilir:
Kod:
[gcode_macro PRINT_START]
gcode:
# Isıt
M140 S{params.BED|default(60)}
M104 S{params.EXTRUDER|default(200)}
M190 S{params.BED|default(60)}
M109 S{params.EXTRUDER|default(200)}
# Home
G28
G1 Z10 F3000
# Adaptive mesh
BED_MESH_CLEAR
BED_MESH_CALIBRATE ADAPTIVE=1
# Purge line
G92 E0
G1 X5 Y20 Z0.28 F6000
G1 X5 Y120 Z0.28 F1500 E12
G1 X10 F6000İlk baskınızı aldıysanız daha ne olsun...

Benim ilk baskım bayağı güzel çıktı. Ufak tefek pürüzler olsada gayet iyi.
-İnput Shaping-
Eğer input shaping'i de çalıştırmak isterseniz o da makrolar içinde mevcut. Tek tuşla çalıştırabilirsiniz. Yalnız ben heralde onu tam düzgün yapamadığımdan bir türlü otomatik kaydetmedi. O sebeple el ile manuel olarak kaydetmeniz lazım değerleri.
Not!!!!! Çok saçma bir şekilde Hotend'i soğutan fan ciddi anlamda titreşim yayıyor. Bu sebeple ASLA bakın ASLA herhangi bir fan çalışırken input shaping'i çalıştırmayın. Yoksa X ekseninde 1200 gibi saçma sapan bir değer çıkıp, baskının içine edecektir.
Normal değerler 10 ila 50 aralığında olmalı.
[input_shaper]
shaper_type_x: ei
shaper_freq_x: 51.8
shaper_type_y: mzv
shaper_freq_y: 51.4
damping_ratio_x: 0.1
damping_ratio_y: 0.1
Printer.cfg dosyasındaki bu bölümü bulmanız gerekli. Bulduktan sonra konsolda yazan X ve Y ekseninin değerini şu kırmızıyla işaretlenen yerlere yapıştırın. Bu şekilde olacaktır.
Ben 160m/s dış duvar hızı ve 5.000m/s ivmelenme ile idare eden sonuçlar aldım. Tabii bir de kullandığım masanın çok fazla sallanmasıda etken bu duruma.


Tablanın haline bakmayın yanlış bir şey olup çizer diye yenisini takmadım. Bir daha 1000TL'lik masrafa giremem...
6. Bölüm: Ben her şeyi batırdım – Stok Sisteme Geri Dönüş (Kurtarma Rehberi)
Şimdi her şeyi batırdıysanız ve geri almak istiyorsanız zor değil. Tek yapmanız gereken şunlar:
Release Neptune4_4pro_image-V1.1-20231104 · NARUTOfzr/neptune4_4pro_klipper_images
Only applicable to Neptune4&4Pro. After installing the image, please select the fix package of the corresponding machine to update the firmware. 1.仅适用于Neptune4&4Pro。 2.安装镜像后请选择对应机型的修复包更新固件。
github.com
Buradan İMG dosyasını indirip eMMC modülüne aynen önceden yaptığımız gibi yazdırın. Bu şekilde eski Firmware'e dönmüş olacaksınız. Ekranda geri gelecektir.
7. Bölüm: Sonuç
Sonuç mu? Artık kırmızı hata görmekten korkuyorum...
Aynı buna döndüm...
Bu saçmalığı kurarken o kadar hata çıktı ki say say bitmez, muhtemelen 1000’in üzerinde. Birini düzeltiyorsun, başka bir hata patlıyor. Onu hallediyorsun, bir diğeri çıkıyor. Alınır mı sorusuna cevabımı baştan vermiştim zaten. Hem yazıcının ekranı artık çalışmıyor, hem de üç hafta boyunca bu saçmalıkla uğraştım.

Yazıcı artık Neptune 4'lükten çıktı zaten. Ama büyük ekran gerçekten çok iyi. Gelecekte kamera eklenirse mükemmel.
Velhasılkelam kısaca:
Almayın da aldırtmayında...
8. Bölüm: I.R.O.N. Değerlendirmesi

